Het geheim van de fiets
Het geheim van de fiets
Techniek Wat houdt een rijdende fiets overeind? Na 150 jaar rekenen en meten is daar nu zicht op. ‘Je intuïtie bedriegt je.’
Eerst langs bij Nature, want Nature had lang, heel lang geleden wel interesse in de stabiliteit van de fiets. Maar die belangstelling was inmiddels verdwenen. Toen naar Science. Science zag onmiddellijk het geniale ervan in en was enthousiast: in december aangeboden, in maart geaccepteerd, een maand later geplaatst. Ongekend snel voor een papieren tijdschrift.
Op 15 april publiceerde Science zwart op wit het experimentele bewijs dat een fiets voor zijn zelf-stabiliteit niet afhankelijk is van de gyroscopische werking van zijn wielen, en ook niet van de typische achteroverhangende stand van de voorvork, inclusief die typische bocht erin. Niet van naloop, zoals dat heet. De fiets werkt niet zoals iedereen dacht dat hij werkt. Eerste auteur: Jodi Kooijman, promovendus bij de werktuigbouwkundige faculteit 3mE van de TU Delft. Laatste auteur: Arend Schwab, zijn promotor. Daartussen drie bevriende wetenschappers uit binnen- en buitenland, stuk voor stuk expert op het gebied van stabiliteit van tweewielers.
Na 150 jaar meten en rekenen is er zicht op de krachten en koppels die de rijdende fiets overeind houden. Dat is te zeggen: van de fiets zonder berijder, de riderless bicycle, dus van de fiets die een stevige voorwaartse zet kreeg en op eigen kracht nog een seconde of vijftien uitrijdt. En lánger als hij een flauwe helling afrijdt, zoals dat mooi te zien is in de film Jour de Fête van Jacques Tati (1949).
Het wonder is dat deze fiets ‘zelf-stabiel’ is, wat wil zeggen dat hij zich herstelt van een dwarse stoot, zelfs een stevige stoot, die hem onderweg wordt toegebracht. Die brengt hem even aan het slingeren, maar binnen een paar seconden is de fiets daarvan bekomen en neemt hij weer een vaste koers aan, zij het in een iets andere richting dan eerst. Maar met een licht herstel van de snelheid: de energie van het slingeren komt weer ten goede aan de voortgang. Hoe de fiets dat doet heeft fysici en wiskundigen bijna anderhalve eeuw beziggehouden.
Het is niet alleen van theoretisch belang; aannemelijk is dat het rijcomfort van de fietser wordt bepaald door de stabiliteit die de fiets heeft als hij onbereden voortrijdt. Zeker is dat niet, want de aanwezigheid van de fietser op de fiets verandert veel aan diens eigenschappen. En wat de fietser allemaal aan corrigerende krachten en koppels uitoefent met zijn handen (aan het stuur), zijn billen (aan het zadel) en zijn voeten (aan de trappers) dat is nog steeds niet geanalyseerd, zegt Schwab.
Maar de Britse onderzoeker David E.H. Jones heeft het lang geleden min of meer uit het ongerijmde bewezen. Bij zijn fameuze speurtocht naar de onberijdbare fiets, de unridable bicycle, ging Jones ervan uit dat de fiets die zonder berijder niet stabiel was, met berijder ook niet makkelijk te besturen zou zijn, en dat bleek aardig te kloppen. Hij vónd een fiets die niet te berijden was. Jones, van huis uit chemicus, ging destijds sterk intuïtief en gevoelsmatig te werk en noteerde zijn ervaringen in Physics Today van april 1970 met zoveel overtuiging dat het leek alsof het probleem van de stabiliteit definitief was opgelost. Het gezaghebbende handboek Bicycling Science nam zijn conclusies over. Dat Jones de te analyseren situatie onaanvaardbaar had versimpeld en voorbijging aan bijna alle doorwrochte literatuur die sinds 1870 was verschenen bleef onopgemerkt.
Het stabiliteitsdebat is lang beheerst door de vierdelige studie die de Duitse geleerden Felix Klein en Arnold Sommerfeld rond 1910 over de tol en de gyroscoop uitbrachten. Daarin leken zij overtuigend aan te tonen dat de rijdende fiets zijn stabiliteit dankt aan het gyroscopisch effect van de wielen, in het bijzonder van het voorwiel. Het idee werd makkelijk geaccepteerd omdat het aansluit bij het gevoel. Wie zelf eens een snel draaiend fietswiel in handen heeft gehouden weet hoeveel moeite het kost om dat een andere richting te geven en wat voor krachten en momenten er optreden als je hem van richting probeert te veranderen.
David Jones is de man geweest die het accent verplaatste van gyroscoop naar ‘naloop’. Dat kon en mocht omdat hij een fiets wist te bouwen waarin het gyroscopisch effect van het voorwiel kunstig was opgeheven door een parallel wiel dat in tegenovergestelde richting draaide. Die fiets was nog steeds te berijden, zelfs ‘zonder handen’.
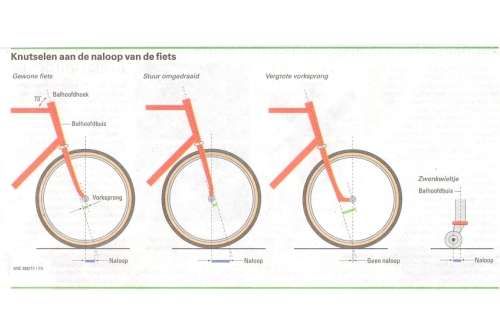
Jones was ervan overtuigd dat de zelf-centrerende eigenschap die het voorwiel van een onbereden rijdende fiets kennelijk heeft op dezelfde wijze tot stand komt als het zelfcentreren van de zwenkwieltjes onder een winkelwagentje. Die wieltjes (casters, in het Engels) danken de eigenschap aan de forse afstand tussen hun contactpunt met de grond en het verlengde van de vertikale as waar zij om kunnen zwenken. Die afstand heet de naloop, ofwel trail. (Zie de illustratie onder ‘Knutselen aan de naloop van de fiets’)

Zwaar sturen
Het voorwiel van de gewone fiets heeft ook nogal wat naloop omdat de voorvork schuin achterover helt, in eerste instantie om het stuur binnen bereik van de berijder te brengen. De lichte kromming in de voorvork (de vorksprong) voorkomt dat de naloop te groot wordt. Fietsen met een erg grote naloop, zoals die waarbij het stuur achterstevoren is gezet, zijn wel stabiel, zoals ook Jones aantoonde, maar sturen zwaar. Maar de fiets met negatieve naloop die Jones fabriceerde, was praktisch onberijdbaar.
Tot vijfentwintig jaar geleden was dit de geaccepteerde theorie: de stabiliteit komt van gyroscopisch effect en naloop. Het was niet overtuigend mathematisch uitgewerkt, maar klopte met het gevoel. Arend Schwab c.s. hebben het nu zowel theoretisch als experimenteel weerlegd. Gyroscopisch effect en ‘caster effect’, dat is die naloop, zijn nuttig, maar niet noodzakelijk. Er is wel degelijk een zelfstabiele fiets te maken zonder die twee effecten, door een weldoordachte verdeling van een aantal forse puntmassa’s over frame en vork.
Het fietsje hier op de foto (linksonder), de TMS-fiets, is er zo een. Het gyroscopisch effect van de wielen is opgeheven door ze elk apart een loos wiel van identieke grootte en massa in omgekeerde richting te laten aandrijven. De vork is zo vormgegeven dat de gewone positieve naloop is vervangen door een kleine negatieve naloop. Bij de achteras en hoog voor het stuur is, ondersteund door koolstofbuizen, een stel loden gewichten aangebracht. Meer was niet nodig, behalve veel vindingrijkheid om het fietsje te construeren. Dat was de verdienste van Jodi Kooijman. De fiets heeft in een Delftse sporthal al vele kilometers afgelegd en hij bleek schitterend stabiel.
Een wiel zonder gyroscopisch effect is in essentie niets meer dan een schaats. Zo ontstond de naam two-mass-skate bicycle: TMS. De TMS is bedacht door de Amerikaanse MIT-ingenieur Jim Papadopoulos die in het stabiliteitsonderzoek een bindende rol speelde. Rond 1985 rees bij hem het vermoeden dat de zo breed geaccepteerde verklaring van David Jones niet klopte. Hij meldde zich voor een postdoctorale specialisatie bij Andy Ruina van Cornell University die bekend was door zijn onderzoek aan de mechanica van de voortbeweging, onder andere die van robots en dieren. Het werd het begin van een diepgravend onderzoek naar de werking van de fiets die beiden niet meer heeft losgelaten.
Balanceren bezemsteel
Arend Schwab van de TU Delft raakte via een student op de hoogte van het werk van Ruina en Papadopoulos en bracht in 2002-2003 een sabbatical leave bij Ruina door. Die vroeg hem de hele serie bestaande publicaties over fietsstabiliteit, die al loopt vanaf 1869, kritisch door te lichten en op te schonen. Van het een kwam het ander, uiteindelijk kwam de groep, waartoe ook nog Jaap Meijaard uit Twente toetrad, tot het opstellen van de fundamentele vergelijkingen die het gedrag van de fiets verklaren. In 2007 publiceerden ze die in de Proceedings of the Royal Society. Het recente stuk in Science behandelt vooral ontwerp en eigenschappen van de experimentele fiets.
De wiskunde achter het werk is niet eenvoudig en Science zette die liever apart in een bijlage. Centraal in de analyse staat de constatering dat een fietser zijn fiets overeind houdt door ‘in de val te sturen’. Helt hij naar rechts dan stuurt hij naar rechts en brengt hij het steunpunt weer onder het zwaartepunt, zoals je doet bij het balanceren van een bezemsteel op je hand. De aanname is dat de zelfstabiele onbereden fiets vanzelf zo stuurt. Het onderzoek richt zich dus op de vraag hoe een bepaalde schuine stand van het frame tot een bepaalde uitslag van het stuur leidt, en hoe die – omgekeerd – weer de stand van het frame wijzigt. Jones deed dat voor een stilstaande fiets, een statische situatie, en daarin schuilt zijn voornaamste tekortkoming. Bij een rijdende fiets is het krachtenspel wezenlijk anders, en vooral veel onoverzichtelijker. Jones is van zijn voetstuk gestoten. Maar ook Klein en Sommerfeld hebben schade opgelopen: Jaap Meijaard ontdekte belangrijke fouten in hun werk. “We hebben twee dingen geleerd”, zegt Schwab. “Je moet per se niet op je gevoel afgaan, want intuïtie bedriegt in dit probleem. Stug meten en rekenen is het devies. En je kunt niet één factor veranderen zonder tegelijk ook andere factoren te veranderen. Er zullen meerdere combinaties zijn die tot een goede fiets leiden.”
En nu? Doorwerken aan het onderzoek naar de manier waarop de wielrijder zijn fiets bestuurt. “En het zou mooi zijn als we het hoofdstuk over sturen en stabiliteit in Bicycling science mochten herschrijven.”
Zie ook: https://bicycle.tudelft.nl/stablebicycle/
In de film Jour de fête zit een klassieke scène van een kleine twee minuten, waarin een fiets door een auto wordt gelanceerd en vervolgens alleen doorrijdt. Tijdens de achtervolging, door de postbode van het dorp, neemt de fiets een bocht, steekt een kruispunt over en parkeert zichzelf bij een café. De scène is te zien op YouTube, link onder het plaatje.
Knutselen aan de naloop van de fiets
Zelf experimenteren met ‘zelfrijdende’ fiets
De bijzondere eigenschappen van de fiets worden duidelijk als hij wordt vergeleken met een hoepel of een los wiel. Een los wiel dat een zetje krijgt en vrij kan wegrollen blijft dankzij het gyroscopisch effect een tijdje overeind maar weet zich niet te herstellen van een verstoring in de vorm van een zijdelingse duw. Die leidt tot fatale slingeringen en een snelle val.
De fiets (zonder berijder) die na een voorwaartse zet vrij kan uitrijden heeft wél het vermogen zo’n verstoring op te vangen. Een zijdelings stoot brengt hem weliswaar aan het slingeren, waarbij het frame flink kan overhellen, maar de slingeringen dempen uit en de fiets verheft zich weer snel. Dat is de zelfstabiliteit ten voeten uit.
Hij komt alleen tot stand als het voorwiel zó kan bewegen dat hij de lijn tussen de contactpunten van de wielen met de weg onder het zwaartepunt van de fiets brengt. Een fiets waarvan het stuur is vastgezet, bijvoorbeeld door de handvatten aan het zadel vast te binden, valt na een voorwaartse zet subiet om. Ook een fiets die een zet in achterwaartse richting krijgt valt direct om. Andy Ruina van Cornell University heeft er diverse filmpjes van gemaakt (YouTube: yellow bicycle demos).
Anderzijds is een fiets waarvan het stuur achterstevoren is gezet (zoals op de tekening), en die aldus een extra grote naloop kreeg, wel zelfstabiel. Dat de fiets in deze configuratie heel andere eigenschappen heeft blijkt als je er een rondje op rijdt. Voor het gewone bochtenwerk moet harder aan het stuur worden getrokken dan anders. Dat wordt extra duidelijk als je, rechtuit fietsend, extreem naar rechts uithangt. Het frame helt dan automatisch sterk naar links en het voorwiel wil zich in de stand voor een linkerbocht zetten. Het stuur moet ongewoon zwaar rechtsom worden getrokken om de fiets op het rechte spoor te houden. Een fiets zonder naloop heeft dat niet.
Wie een fiets aan de hand meevoert zal hem daarbij meestal aan het stuur vasthouden. Maar de fiets is ook met de hand aan het zadel te besturen door hem naar links of rechts te laten overhellen. Het voorwiel draait dan ‘vanzelf’ de juiste kant op. Dit is in essentie ook hoe het rijden ‘zonder handen’ gaat. In dit geval ontvangt het zadel de sturing van de billen. Hoe die hun kracht of koppel overdragen is niet helemaal duidelijk; kan het zadel erg makkelijk draaien dan is het rijden zonder handen praktisch onmogelijk.
De theorie leert dat de zelfstabiele fiets die zich, rijdend en aan zichzelf overgelaten, herstelt van een slingering de slingerenergie weer omzet in voorwaartse beweging. Dat heet ‘energieconservatief’. Sachin Chitta van de University of Pennsylvania heeft aangetoond dat een wielrijder dit effect kan gebruiken om vooruit te komen zonder de pedalen te gebruiken, gewoon door heel hard heen en weer te schudden. ‘Biking without pedaling’, heet dat. Het blijkt dat veel Nederlandse scholieren die techniek beheersen.